Forum » Elektrotehnika in elektronika » Obračanje "avta" - problem pri vezavi
Obračanje "avta" - problem pri vezavi
flasha ::
Pozdrav,
Imam sledeč problem (oz. vprašanje), delam nek projekt z "avtkom" pa me nekaj zanima:
Imam dva motorja (kot je prikazano na sliki, sta pa od baterijskih vrtalnikov "pormašin)), nabavil sem (oz. še bom) dva potenciometra (podobna tistim ko so na RW dalincih) sedaj pa me zanima kako bi naredil to da ko bi zavijal levo (naprej + levo) da bi desni motor deloval hitreje kot levi in obratno. Razumete kaj mislim? Rad bi obračanje tega "avta" pa še nevem točno kako. Lepo bi vas prosil če bi mi lahko kdo narisal vezje kako naj to zvežem.
Za vse odgovore se vam v naprej zahvaljujem
LP Nejc
Imam sledeč problem (oz. vprašanje), delam nek projekt z "avtkom" pa me nekaj zanima:
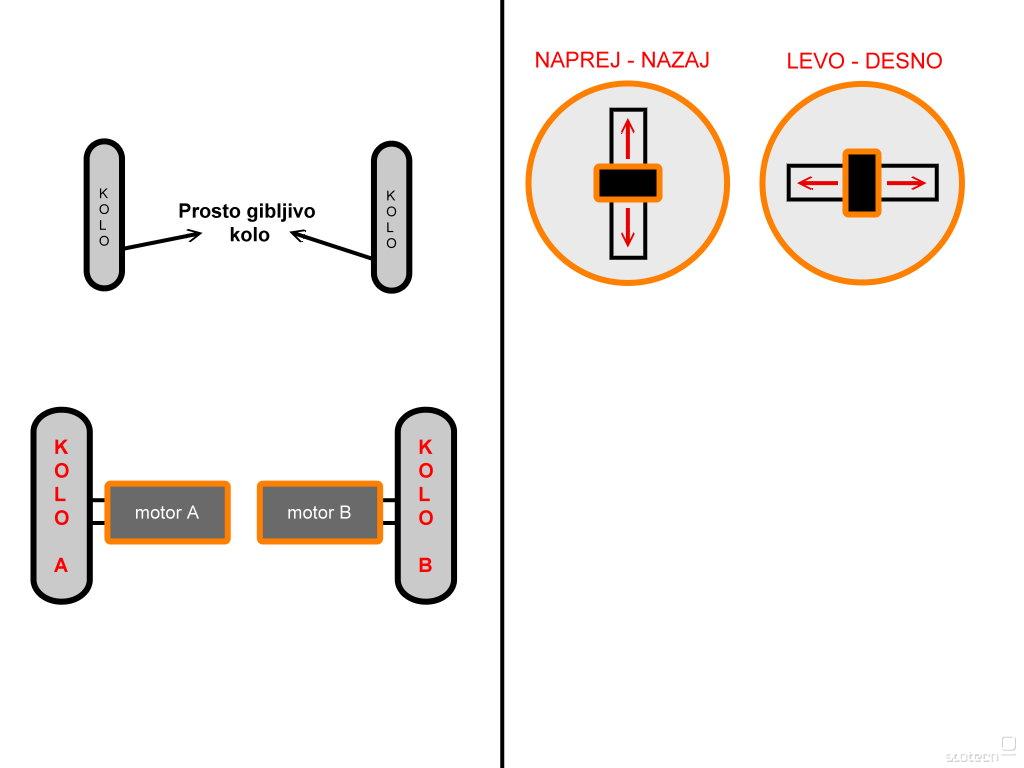
Imam dva motorja (kot je prikazano na sliki, sta pa od baterijskih vrtalnikov "pormašin)), nabavil sem (oz. še bom) dva potenciometra (podobna tistim ko so na RW dalincih) sedaj pa me zanima kako bi naredil to da ko bi zavijal levo (naprej + levo) da bi desni motor deloval hitreje kot levi in obratno. Razumete kaj mislim? Rad bi obračanje tega "avta" pa še nevem točno kako. Lepo bi vas prosil če bi mi lahko kdo narisal vezje kako naj to zvežem.
Za vse odgovore se vam v naprej zahvaljujem
LP Nejc
- zavaroval slike: Azrael ()
Azrael ::
Če te prav razumem, bi ti rad zavijal samo s pomočjo pogonskih motorjev, nekako tako, kot gre pri vozilih na gosenice ali pri ladijskih modelih, ki imajo samo 2 motorja in nič krmila?
Za tak namem, če že imaš ali nameravaš uporabiti daljinsko vodenje za RC modele, bi bilo najbolj enostavno kupiti 2 regulatorja za enosmerne motorje in potem vsak motor upravljaš s svojo ročico. Upravljanja se boš seveda moral navaditi, saj bo učinek zavijanja zelo odvisen od podlage na katerem bo vozilo (zraven pa bo svoje naredila še razporeditev teže in mere vozila).
Ackermanov princip (šofiranje prednjih koles) ne pride v poštev?
Če pa rabiš samo električni diferencial, (da se kolesa ne vrtijo v prazno pri zavijanju) pogonska motorja, ki morata biti itak enaka, enostavno zveži zaporedno , res pa potem rabiš 2x višjo napajalno napetost za ta dva motorja.
Za tak namem, če že imaš ali nameravaš uporabiti daljinsko vodenje za RC modele, bi bilo najbolj enostavno kupiti 2 regulatorja za enosmerne motorje in potem vsak motor upravljaš s svojo ročico. Upravljanja se boš seveda moral navaditi, saj bo učinek zavijanja zelo odvisen od podlage na katerem bo vozilo (zraven pa bo svoje naredila še razporeditev teže in mere vozila).
Ackermanov princip (šofiranje prednjih koles) ne pride v poštev?
Če pa rabiš samo električni diferencial, (da se kolesa ne vrtijo v prazno pri zavijanju) pogonska motorja, ki morata biti itak enaka, enostavno zveži zaporedno , res pa potem rabiš 2x višjo napajalno napetost za ta dva motorja.
Nekoč je bil Slo-tech.
Vredno ogleda ...
| Tema | Ogledi | Zadnje sporočilo | |
|---|---|---|---|
| Tema | Ogledi | Zadnje sporočilo | |
| » | Elektromotorji v avtomobilihOddelek: Znanost in tehnologija | 6696 (5124) | Spock83 |
| » | Tomos Youngster 45 - Registracija?Oddelek: Na cesti | 2953 (2400) | dottor |
| » | Projekt - Wifi RobotOddelek: Elektrotehnika in elektronika | 2333 (2025) | kihc |
| » | CepelinOddelek: Elektrotehnika in elektronika | 4728 (4161) | ql000 |
| » | motor kosilnice -> agregatOddelek: Elektrotehnika in elektronika | 6154 (5922) | flasha |